











Abstract
Building upon the foundations laid by our previous work, this paper introduces Arena 5.0, the fifth iteration of our framework for robotics social navigation development and benchmarking. Arena 5.0 provides three main contributions: 1) The complete integration of NVIDIA Isaac Gym, enabling photorealistic simulations and more efficient training. It seamlessly incorporates Isaac Gym into the Arena platform, allowing the use of existing modules such as randomized environment generation, evaluation tools, ROS2 support, and the integration of planners, robot models, and APIs within Isaac Gym. 2) A comprehensive benchmark of state-of-the-art social navigation strategies, evaluated on a diverse set of generated and customized worlds and scenarios of varying difficulty levels. These benchmarks provide a detailed assessment of navigation planners using a wide range of social navigation metrics. 3) Extensive scenario generation and task planning modules for improved and customizable generation of social navigation scenarios, such as emergency and rescue situations. The platform's performance was evaluated by generating the aforementioned benchmark and through a comprehensive user study, demonstrating significant improvements in usability and efficiency compared to previous versions.
Motivation
- Social navigation faces challenges in bridging simulation-based research and real-world applications
- Existing platforms often lack reproducibility, generalizability, and comprehensive functionality
- Legacy software dependencies complicate the transition from simulation to reality
- Advanced simulators present usability challenges and have restricted accessibility
- Arena 5.0 provides an open-source framework integrating photorealistic simulations with practical tools
General Idea
- Arena provides a unified platform for creating, testing, and benchmarking navigation algorithms
- Four key components: Generate Worlds, Spawn Humans, Spawn Robots, and Benchmarking & Task Modes
- Supports diverse scenarios with realistic human agents and various robot models
- Integrates NVIDIA Isaac Gym, ROS2, and advanced AI models
- Enables researchers to focus on algorithm development rather than simulation setup

Arena Pipeline
Arena is a platform for developing and benchmarking navigation algorithms in human-centric social environments.Features
- Automatic installation script for the arena rosnav environment
- 4 different simulators including Isaac Sim, Unity, Gazebo and Flatland
- We offer prebuilt, realistic simulation environments, including offices, hospitals, canteens warehouses, and much more
- Dynamic Map Generation including dynamic mazes
- Variety of Task Modes for robots and pedestrians
| Task Mode | Short Description | Robots | Obstacles |
|---|---|---|---|
scenario |
load scenario file | ✓ | ✓ |
random |
generate random positions | ✓ | ✓ |
parametrized |
more fine-tuned random | ✓ | |
guided |
waypoint sequence | ✓ | |
explore |
explore map | ✓ |
- Diverse Robot Models
- Variety of Robots including the go1 quadruped robot
- Variety of Planners including our own DRL planner ROSNavRL
- Variety of social force models for pedestrians
- Pipeline for evaluating approaches and analysing them based on standard metrics with our Arena Evaluation package
- Pipeline to train planner agents based on reinforcement learning approaches from stable baselines3
- Modular and flexible structure for extension of new functionalities and approaches
- Fully integrated Move Base Flex in our Arena-Rosnav ecosystem
Benchmarking
Arena 5.0 provides comprehensive benchmarking capabilities for evaluating social navigation algorithms. The framework includes multiple metrics for assessing performance across different scenarios.
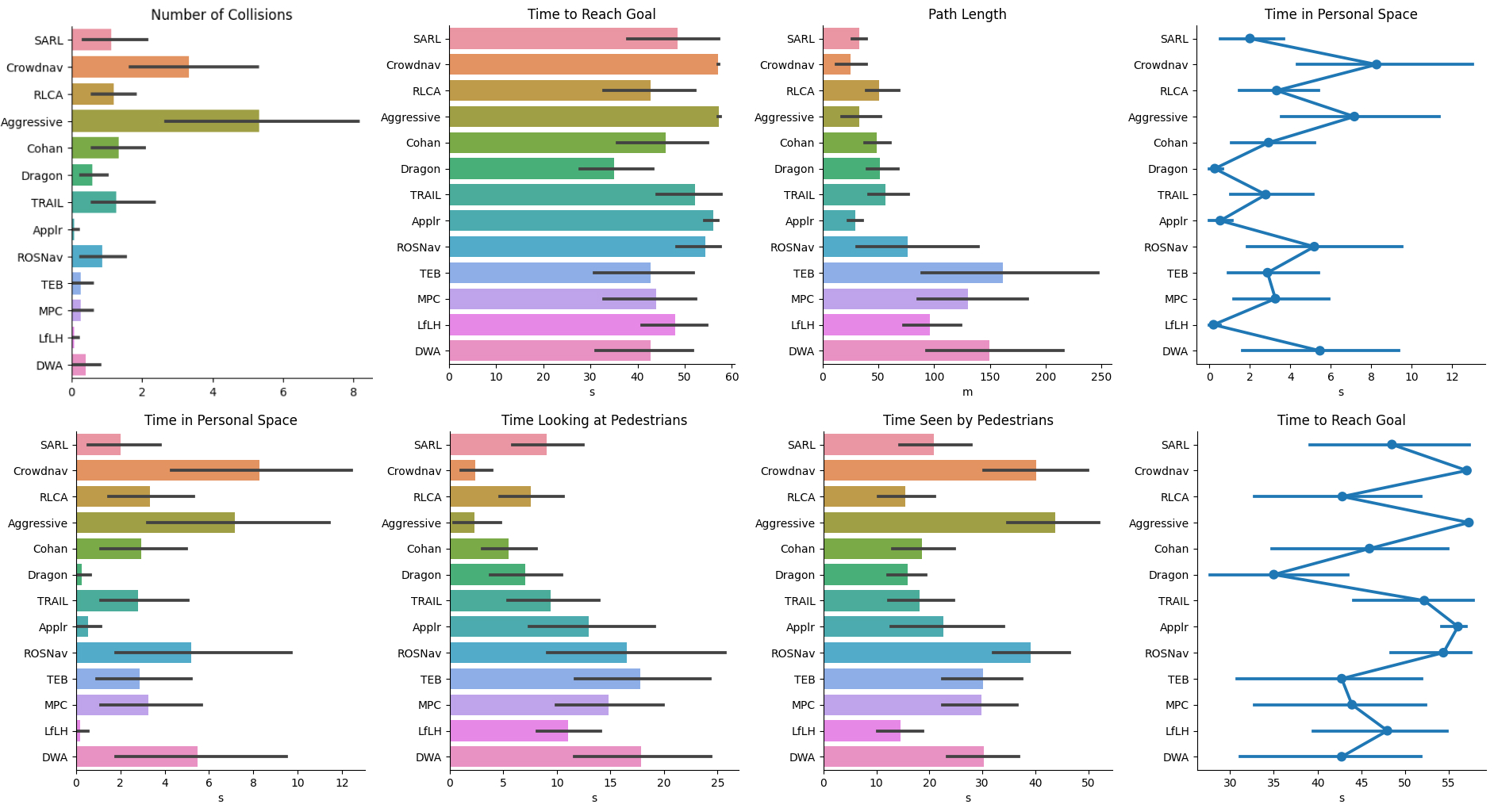
The benchmarking system evaluates navigation algorithms using metrics such as:
- Number of Collisions
- Time to Reach Goal
- Path Length
- Time in Personal Space
- Time Looking at Pedestrians
- Time Seen by Pedestrians
These metrics provide a comprehensive assessment of both navigation efficiency and social awareness, allowing researchers to identify strengths and weaknesses in their algorithms.
Generated Worlds
Please select an image below to view the results.
BibTeX
@misc{shcherbyna12024arena40comprehensiveros2,
title={Arena 4.0: A Comprehensive ROS2 Development and Benchmarking Platform for Human-centric Navigation Using Generative-Model-based Environment Generation},
author={Volodymyr Shcherbyna1 and Linh Kästner and Diego Diaz and Huu Giang Nguyen and Maximilian Ho-Kyoung Schreff and Tim Lenz and Jonas Kreutz and Ahmed Martban and Huajian Zeng and Harold Soh},
year={2024},
eprint={2409.12471},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2409.12471}, }